
Vratná smyčka
Na testovacím kolejišti jsem vyzkoušel systém funkční vratné smyčky, kterému k činnosti stačí výhybkový dekodér s polarita smyčky závisí na poloze vjezdové výhybky. Schema je na obrázku:
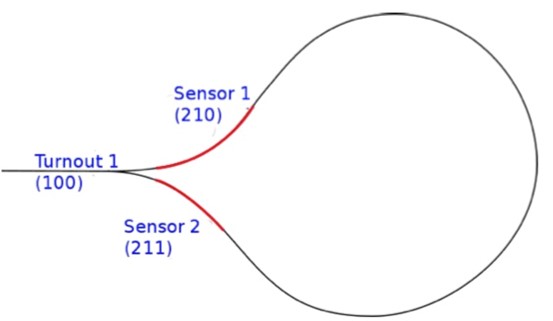
Vlak vjede do smyčky výhybkou Turnout 1. například přímo. Polohou výhybky je určena polarita ve smyčce. Na začátku smyčky je detektor obsazení sensor 1, ovládající polohu výhybky a tím i polaritu ve smyčce. Polarita ve smyčce poloze výhybky v této době odpovídá a proto nedojde k žádné změně. Před koncem smyčky je druhý detektor obsazení Sensor 2, jehož aktivace způsobí změnu polohy vjezdové výhybky do stavu „do odbočky“ a tím změni i polaritu ve smyčce. Vlak pokračuje v jizdě bez přerušení, protože změna polarity nemá na průběh jízdy vliv. Jak je zřejmé z popisu, příští průjezd smyčkou bude opačným směrem. To většinou nevadí, lze tomu ale zamezit umístěním třetího detektoru obsazení před vjezdovou výhybkou, ten zajistíí její přehození do požadované polohy. Tenhle třetí detektor obsazení musí být v dostatečné vzdálenosti před vjezdovou výhybkou, aby nemohlo dojít k jejímu přehození v době, kdy je na ní ještě vlak opouštějící smyčku..
Pro testování jsem použil servodekodér, v němž je pět relé, určených pro napájení srdcovek. Jedno z nich jsem využil pro přepínání polarity ve smyčce, nepotřeboval jsem tedy žádné komponenty kromě servodekodéru a dvou detektorů obsazení. Smyčka fungovala naprosto spolehlivě.
Pokud by místo serv byly použity motorické přestavníky, bylo by možné použít výhybkový dekodér, pro přepínání polarity ve smyčce závislé na poloze výhybky by pak bylo nutné pro její přepínání použít přepínací relé.
Místo detekcí obsazení by bylo možné použít třeba vhodně zamaskovaných optických snímačů a nemuset tak řezat koleje, což by u kolejiště s ukončenou pokládkou kolejí mohlo představovat problém. Tohle řešení ale nemám vyzkoušeno.